Hi,
i got a problem here, where i would like to hear your opinions:
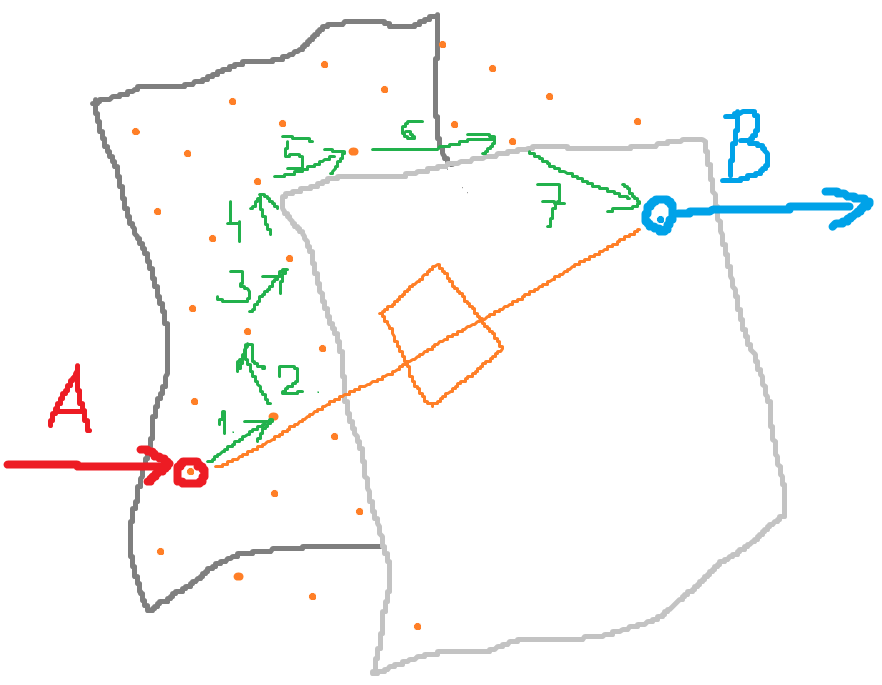
I got a bounding box closed by freeform surfaces. There is 2 point on the adjacent boundaries, called A and B.
I can create a uniform point-cloud in this bounding box, where the distance between any 2 neighbour point is T.
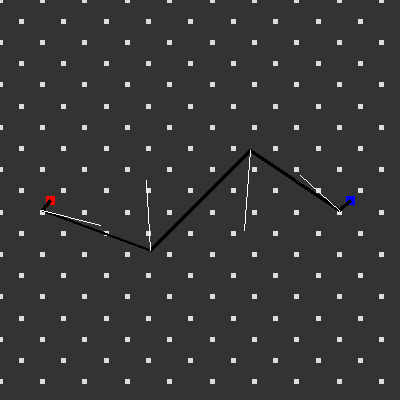
I need to find the straightest path between A and B. Of course a straight line between A and B would be the ideal, but thats not always possible.
Finding a path is just jumping from point to a neighbour point randomly and storing the point ID-s along the way.
Lets say Y jump is allowed, then an algorith can generate all the paths in matter of seconds.
I can close out all the paths which doesn’t ends in B.
Then we have all the paths, which starts in A and ends in B.
We know the allowed maximal path lenght (L), and as we know the count of jumps on every path and the distance between the points, we can close out all the paths which is longer.
Now we have a handful of paths which starts in A and ends in B and their lenghts is less than the allowed maximal lenght (L).
Now i am interested in the most straight path. This is tricky.
We can create a straight line between A and B. We can create a perpendicualr plane on this straight line.
Projecting the points of all the different paths on this plane results a planar point-cloud. The bigger the resulting point cloud the bigger the path deviance from a straight line (as each point of a straight line projected onto a plane perpendicular to the same line results points in the same place, technically one result).
Now this would result the straightest path between A and B which is shorter than the maximal lenght.
Of course, one could implement the checks in the path-generating process, but i even my way would result solution in matter of minutes on modern hw.
I am not doing too much programming, but i have some experiences with Python. Is it possible to doing this with it?
Feel free to express constructive critique. Thank You!