hello everyone… i promised an update on the arm64 port so here we go:
I was able to spend some time testing and integrating the patches from @milek7 and there are some promising results.
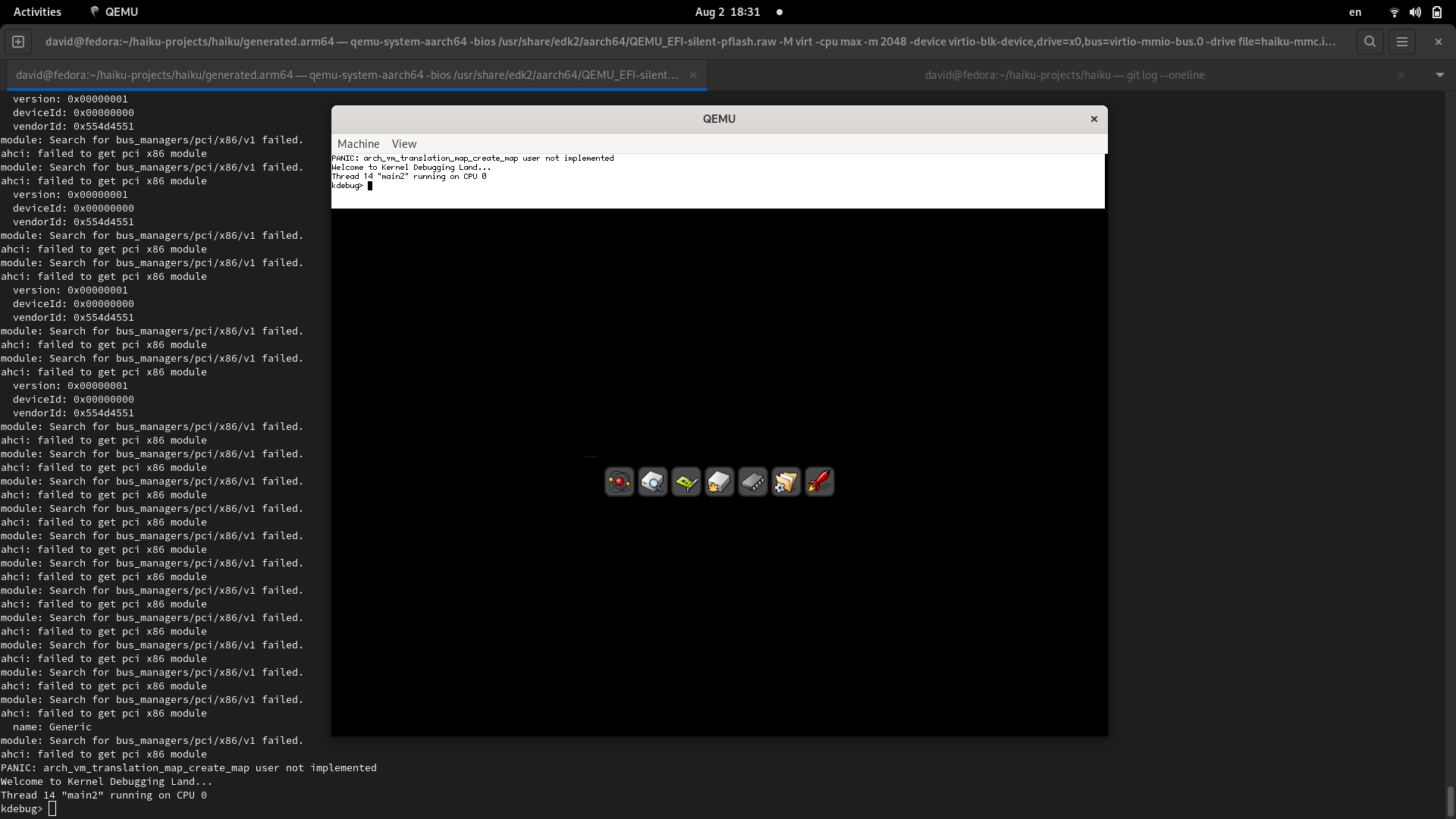
Basically I was able to reproduce the rocket icon on qemu with u-boot and TianoCore - see the screenshot below.
There are still a few reviews outstanding though.
review #4717 seems to be a critical one, to get virtio working
We can reach the rocket icon with the following combos, using the code from one or more open reviews:
u-boot + virtio-mmio detected from FDT - merged
TianoCore + virtio-mmio detected from ACPI - merged
TianoCore + virtio-pci with PCI detected from ACPI - merged
The following combo needs some additional effort:
u-boot + virtio-pci with PCI detected from FDT, I have an initial patch but interrupt handling is not there yet - under review. - merged.
This last one can also be generalized to the 32-bit ARM port with minimal effort. - merged
No entry to user space yet, as translation map creation for user mode is not implemented.